It looks like you're using an Ad Blocker.
Please white-list or disable AboveTopSecret.com in your ad-blocking tool.
Thank you.
Some features of ATS will be disabled while you continue to use an ad-blocker.

Robot Octopus Shows Off New Sculls
page: 11
share:
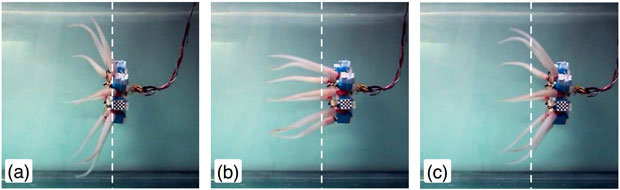
Octopi are pro swimmers, thanks (at least in part) to that octet of arms they've got going on. They've adopted a particular swimming gait called sculling, which works great for them, but until they start publishing scientific papers, we're missing out on all of their gait testing data. Roboticists have had to start from scratch, and along the way, they've experimented with some swimming gaits that we've never seen a real octopus try and pull off.
A group of robotic scientist have program a miniature octopus robot to study how real octopus swim.
Here are some cool videos to give you an idea how octopus swim within the water.
Of all of these gaits, the only one that octopi actually use is the sculling gait, when all eight arms move in synchrony. However, according to recent experiments, some of the artificial gaits produce much smoother movements, which may make more sense for octopus-inspired robots.
Towards the end of the video, rigid tentacles are replaced with undulating compliant arms that look alarmingly realistic. There are still some important bits missing, though: in addition to the pump jet motor that serves as an octopus' primary method of propulsion, real octopi also have a web that connects the bases of the tentacles to each other. Future research on this project will start taking a look at what effect the web has on propulsion, and how actively controlled, multi-joint arms can be used to come up with even more gaits.
To be honest this project is really cool and I hope they'll have success with this project in the future.
Source
Source 2
new topics
-
Biden Withholding Sensitive US Intelligence on Hamas Leaders From Israel
US Political Madness: 54 minutes ago -
Anybody else go to the movie theater a lot? Have you noticed how dead they are?
General Chit Chat: 1 hours ago -
Trump Record Breaking Campaign Rally 5/11 in New Jersey Draws 100,000 People
2024 Elections: 1 hours ago -
something falls in Canada
Aliens and UFOs: 1 hours ago -
US mistakes in assessing the military potential of China and Russia
ATS Skunk Works: 4 hours ago -
Slow moving ufo over Mexico volcano Popocatepetl 8 May 2024
Aliens and UFOs: 11 hours ago
1