It looks like you're using an Ad Blocker.
Please white-list or disable AboveTopSecret.com in your ad-blocking tool.
Thank you.
Some features of ATS will be disabled while you continue to use an ad-blocker.

Robotic Fish Gain New Sense: Navigate Water Currents and Turbulence
page: 11
share:
Mar. 6, 2013 — Scientists have developed robots with a new sense -- lateral line sensing. All fish have this sensing organ but so far it had no technological counterpart on human-made underwater vehicles.
www.sciencedaily.com...
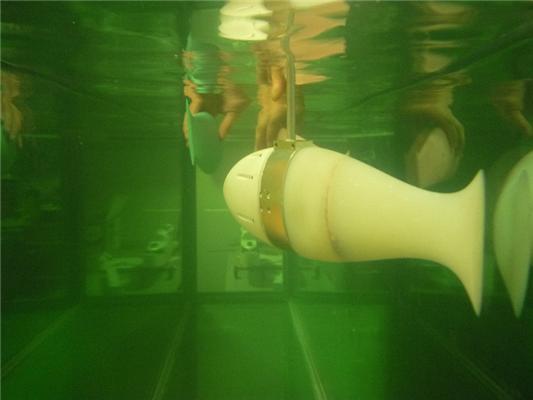
In an article published in Proceedings of the Royal Society A, researchers describe a robotic fish that is controlled with the help of lateral line sensors. During the last 4 years, the EU funded European research project FILOSE has investigated fish lateral line sensing and locomotion with the aims of understanding how fish detect and exploit flow features, and of developing efficient underwater robots based on biological principles. Though flow is a highly volatile and unsteady state of matter, it can nonetheless be measured and characterized based on many salient features that do not change much in space and time (such as flow direction or turbulence intensity, for example). These salient features can then be described as a "flowscape" -- a flow landscape that helps fish and robots to orient themselves, navigate and control their movements.
"So far flow in robotics is treated as a disturbance that drives the robots away from their planned course," says Prof. Maarja Kruusmaa, the Scientific Coordinator of the FILOSE project. "We have shown that flow is also a source of information that can be exploited to better control the vehicle. Also, flow can be a source of energy if we can understand the flow dynamics and interact with eddies and currents in a clever way." Experiments with flow sensing and actuation in FILOSE have demonstrated that a fish robot can save energy by finding energetically favorable regions in the flow where the currents are weaker or by interacting with eddies so that they help to push the robot forward. The robots are also able to detect flow direction and swim upstream or hold station in the flow while compensating for the downstream drift by measuring the flow speed. FILOSE robot hovering in the wake of an object in the flow is demonstrated to reduce its energy consumption. "It is similar to reducing your effort in the tailwind of another cyclist or reducing the fuel consumption of your car by driving behind a truck," Prof. Kruusmaa says.
Several prototype artificial lateral lines and robot actuators were developed in FILOSE to experimentally investigate different aspects of sensing and locomotion in fluids, such as how to use compliant materials to efficiently swim in turbulence, how to build robots that are mechanically simple but still behave like fish, how to interpret flow features and use them for controlling the vehicles, and how to measure robot's own motion from the flow signals. The FILOSE project has contributed to our understanding of the "fish-centric" viewpoint of the aquatic environment. "Robotic experiments have also helped us to understand fish behaviour," says FILOSE collaborator Prof. William Megill, who led the University of Bath's contribution to the project. "By recording flow sensor data from a robotic fish head which we've programmed to move like a real fish in similar flow conditions, we are able to understand what fish are able to perceive." The lateral line sensing fish robots have been a joint effort of experts in fish biology (University of Bath, UK), underwater robotics (Tallinn University of Technology, Estonia), mechanical engineering (Riga Technical University, Latvia), signal analysis and flow perception (Verona University, Italy) and of sensor technology (Italian Institute of Technology).
Oh great. So now were gunna have to worry about water drones? What are we gunna have to do. Drown ourselves?
And wud up with the oil industry making underwater bases like they are some james bond villians.
I could see some of the elite having a shark pit tho.
edit on 7-3-2013 by CrypticSouthpaw because: (Edit)
edit on 7-3-2013 by CrypticSouthpaw because: (no
reason given)
new topics
-
AI phrenology
Science & Technology: 4 hours ago -
4/27/24 New Jersey Earthquake
Fragile Earth: 9 hours ago -
Fun with extreme paints
Interesting Websites: 11 hours ago
1